Efficient Ray-Tracing for Urban Radiation Source Localization
Abstract
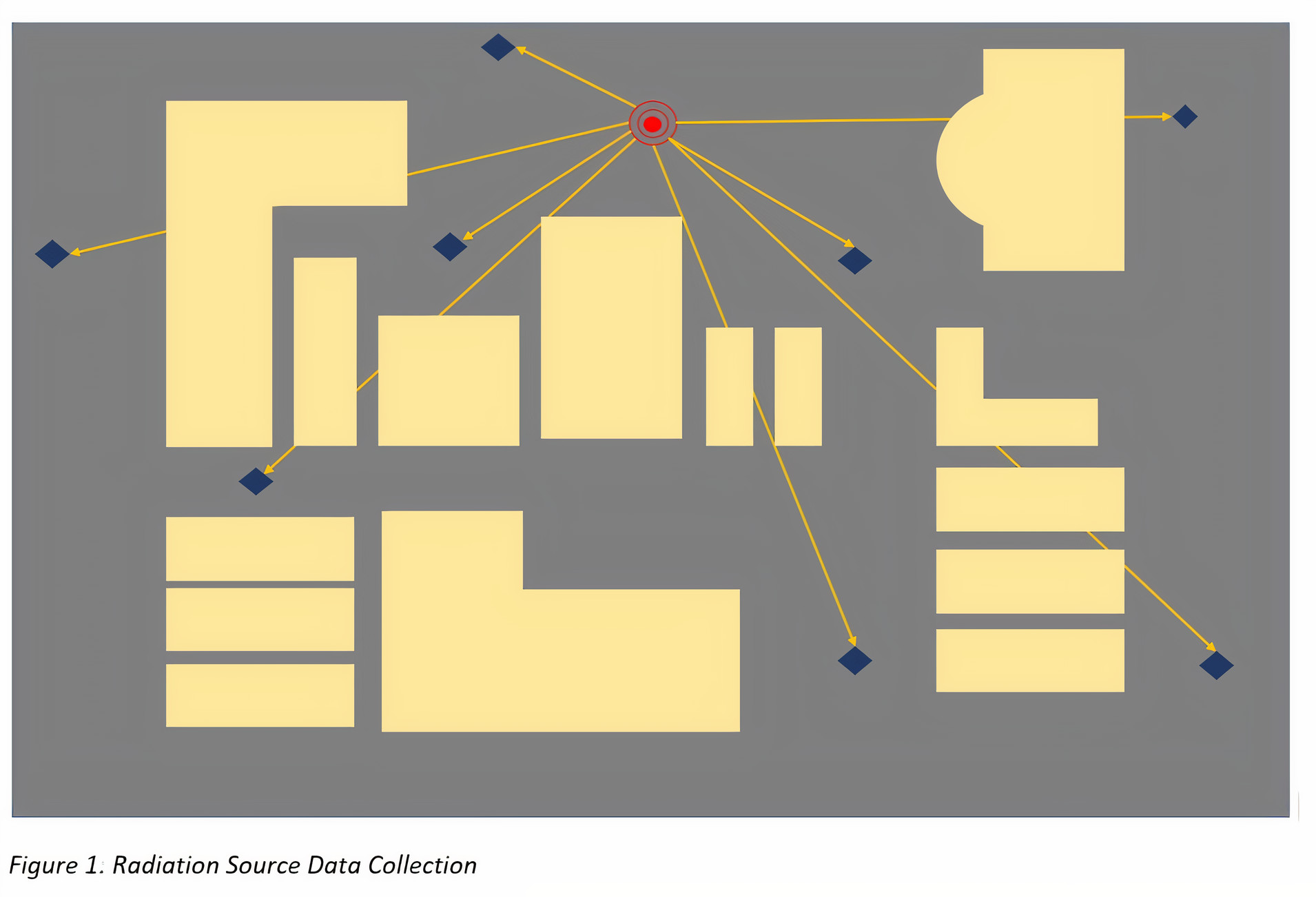
Our work is motivated by the problem of urban source localization. This is the problem of estimating the location of a potentially threatening radioactive source (depicted by the red dot) using radiation data collected at several radiation detectors scattered throughout the city (depicted with blue diamonds), as depicted in the figure 1. Source localization requires computing the average response at a detector given a source which requires us to determine the intersections between the source-detector rays and the urban environment. We used the NVIDIA OptiX ray tracing engine to efficiently compute the intersections and demonstrate the computational advantages of this approach over using a non-parallelized ray tracing program.
Introduction
The loss or theft of radioactive nuclear materials poses a serious security threat especially in urban environments where the large amount of critical infrastructure and dense populations make acts of negligence or terrorism involving nuclear materials particularly devastating. These concerns have motivated research in radioactive source localization in urban environments. Radioactive source localization is the application of mathematical and statistical models to estimate the location of a radioactive source hidden in an urban environment.
As illustrated in Figure 1, the radioactive source (the red dot), emits radioactive particles that collide with radiation detectors (blue diamonds) inducing a reading at the detectors. We model the expected or average detector reading assuming a particular source location. Given detector data, we can estimate the source location most consistent with the data. This estimation problem often requires evaluating the expected detector response model thousands of times making it critical that researchers have a computationally efficient method for computing the expected detector response [1]
A Model for Expected Detector Response
Some researchers have proposed an approximation to detector response derived from Boltzmann transport theory [2]. While this approach is one of the most computationally efficient methods for computing the expected detector response, it can still be expensive when performing source localization in urban environments. The expression for computing the expected response is: \[ \gamma _{ij} = I_j \times \Delta t_i \times \epsilon _i \times {{A_i}\over{4 \pi ||d_i - s_j||^2 }} \times e^{ - \sum_{p=1}^{N_l} l_p \times \sum_{T}^{(p)} } \] where \(\gamma _{ij}\) is the response at the \(i^{th}\) detector for the \(j^{th}\) source, \(I_j\) is the intensity of the \(j^{th}\) source, \(t_{i}\), \(\epsilon _i\) , and \(A_i\) are the dwell time, efficiency, and area of the \(i^{th}\) detector respectively. \(d_i\) is the 3D location of the \(i^{th}\) detector, \(s_j\) is the location of the \(j^{th}\) source, \(N_l\) is the number of buildings in the urban environment on the ray connecting the source to the detector, \(l_p\) is the intersection of the ray connecting the source to the detector and the \(p^{th}\) building, and \(\sum_{T}^{(p)}\) is the macroscopic intersection of the \(p^{th}\) building. As can be seen from the equation, for each pair of detector and source, we must compute the intersections between the buildings in the urban environment and the straight line path between the source and the detector. Computing these intersections can be challenging in complex urban environments with many buildings.
Software already exists for efficiently computing this expected detector response in two dimensions [3]. Our aim is to develop an efficient way of computing the expected detector response in three dimensions.
Methodology
Nvidia's new Turing architecture based GPUs provide RT cores that accelerate ray tracing. Each RT core is composed of a triangular intersection unit and a (Bounding Volume Hierarchy) BVH traversal unit, which can calculate the intersection of ray and triangles in real-time, allowing upto 10 Giga Rays per seconds. Using Nvidia's OptiX engine, we computed the intersection data, between the buildings and segments from a source to a detector, such as the hit locations, and the ID of the hit triangle and the building the triangle belongs to.
We load an urban scene with varying number city components (in our case a set of buildings, approximately 70) into OptiX context. Following to that, we compute a set of multiple rays using CUDA based on the randomly generated location of source-detector pairs. Finally, using the OptiX engine, these rays are then launched through the scene, and the building IDs of the hit is identified via the resulting hit locations.
Results
We compared the NVIDIA OptiX implementation of the ray tracing method to a Python implementation that does not use the NVIDIA RTX GPU for fast ray tracing computation on a machine with an Intel i7-9750H CPU with 2.6 GHz CPU and an NVIDIA GeForce RTX 2060 GPU, running Windows 10 OS. We compare the performance of these two implementations by measuring the time required to compute the expected detector response for various sets of source detector pairs.
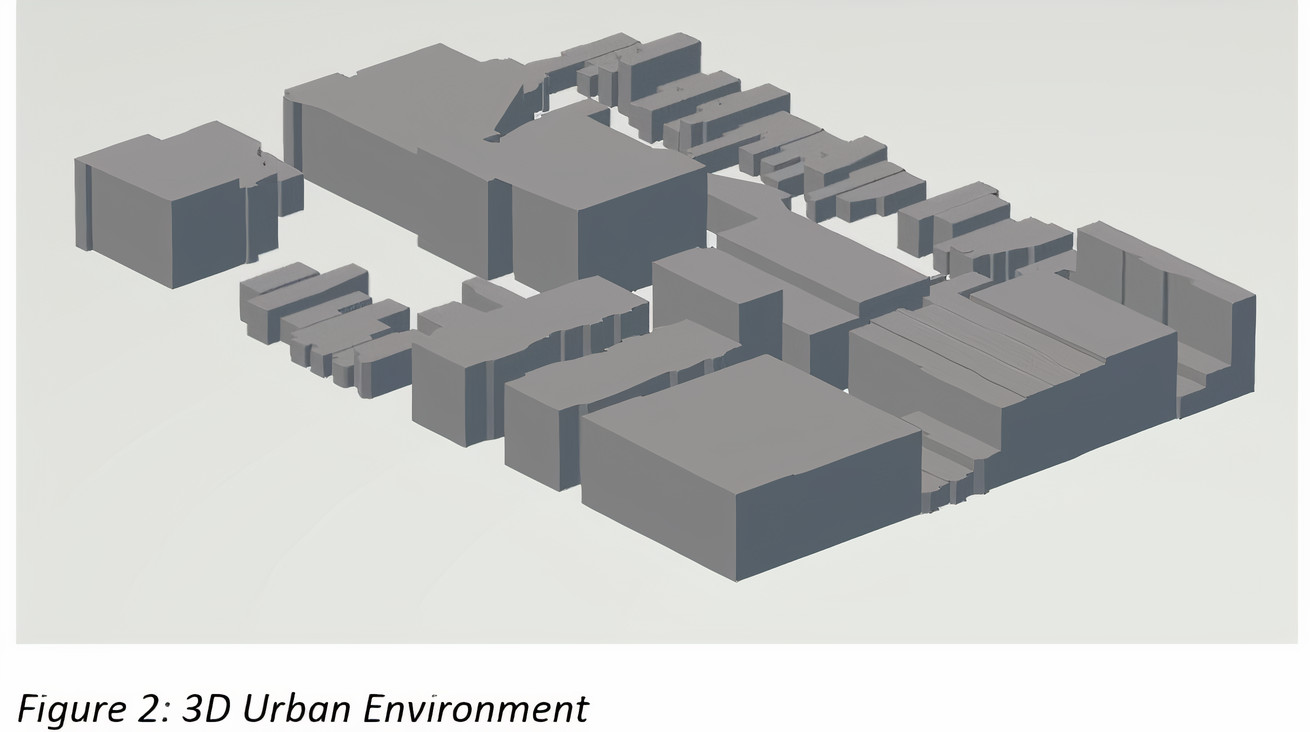
Figure 2 depicts the urban environment that we used in our simulations. The urban environment is a representation of the Johnson Ave NW Block of Washington, D.C. The map data used to create the environment was taken from OpenStreetMap © OpenStreetMap contributors available under the Open Database License.
We randomly generated 1000 radiation source locations. For each of these sources, we computed the expected detector response at 1, 5, 10, 20, 30, 40, 50, and 100 randomly generated detector locations. The completion time results are depicted in the graph, figure 3.
As can be seen from the figure, the OptiX implementation consistently outperforms the Python implementation. The advantage of the OptiX implementation becomes particularly pronounced for very large sets (>60,000) of source-detector pairs.
Conclusion and Future Work
We have seen the advantages of using OptiX for doing ray-tracing computations in 3D urban environments. Our future work will focus on using this efficient ray-tracing implementation as part of a larger radiation source localization framework. In particular, we are working on determining the optimal placement of radiation detectors to ensure we collect the most informative data on source location. The criteria we use to determine the value of a detector placement requires us to compute thousands of expected detector responses. Thus, having the OptiX implementation will allow us to quickly compute this criteria and thus efficiently determine the optimal placement of radiation detectors.

References
- ^ Miles, Paul R., et al. "Radiation source localization using surrogate models constructed from 3-D Monte Carlo transport physics simulations." Nuclear Technology 207.1 (2021): 37-53.
- ^ Ştefănescu, Răzvan, et al. "Hybrid optimization and Bayesian inference techniques for a non‐smooth radiation detection problem." International Journal for Numerical Methods in Engineering 111.10 (2017): 955-982.
- ^ Hite, Jason, et al. "Localization of a radioactive source in an urban environment using Bayesian Metropolis methods." Nuclear Instruments and Methods in Physics Research Section A: Accelerators, Spectrometers, Detectors and Associated Equipment 915 (2019): 82-93.